Nice start... but why did you buy a complete set?
you can buy only the CU (Starting track) for about $100 CAD so probably around $60-70 in US dollar
Just saying...
Mikey
Using D132 in 143 scale
31 posts
• Page 1 of 3 • 1, 2, 3
Using D132 in 143 scale
![]() by BARC 1 » Fri Apr 29, 2016 9:51 am
by BARC 1 » Fri Apr 29, 2016 9:51 am
-

BARC 1 - HRW SlotCar Veteran!
- Posts: 2040
- Joined: Wed Dec 23, 2015 6:03 pm
- Location: NW Alberta
Re: Using D132 in 143 scale
![]() by MikeySlotCars » Fri Apr 29, 2016 11:55 am
by MikeySlotCars » Fri Apr 29, 2016 11:55 am
-

MikeySlotCars - HRW SlotCar Veteran!
- Posts: 190
- Joined: Thu Oct 02, 2014 10:49 am
- Location: Montréal/Québec/Canada
Re: Using D132 in 143 scale
![]() by BARC 1 » Fri Apr 29, 2016 12:39 pm
by BARC 1 » Fri Apr 29, 2016 12:39 pm
It is cheaper in the long run. You need much more then just the CU to go digital. It also allowed me to play around with the system and understand how it all works. I wanted to know how it should work,before I start doing a bunch of mods on untested ideas.
-
BARC 1 - HRW SlotCar Veteran!
- Posts: 2040
- Joined: Wed Dec 23, 2015 6:03 pm
- Location: NW Alberta
Re: Using D132 in 143 scale
![]() by BazingaRacerX » Fri Apr 29, 2016 3:09 pm
by BazingaRacerX » Fri Apr 29, 2016 3:09 pm
Very interested in the progress and successes you're having. Keep us posted. :music-rockout:
- BazingaRacerX
- Posts: 47
- Joined: Fri Aug 22, 2014 7:03 am
- Location: SW Ontario, Canada
Re: Using D132 in 143 scale
![]() by dc6287 » Fri Apr 29, 2016 8:08 pm
by dc6287 » Fri Apr 29, 2016 8:08 pm
Very interesting take on things, I will be watching this one closely!
-

dc6287 - HRW SlotCar Veteran!
- Posts: 116
- Joined: Thu Sep 06, 2012 1:31 pm
- Location: Chillinois
Re: Using D132 in 143 scale
![]() by BARC 1 » Sat Apr 30, 2016 2:30 am
by BARC 1 » Sat Apr 30, 2016 2:30 am
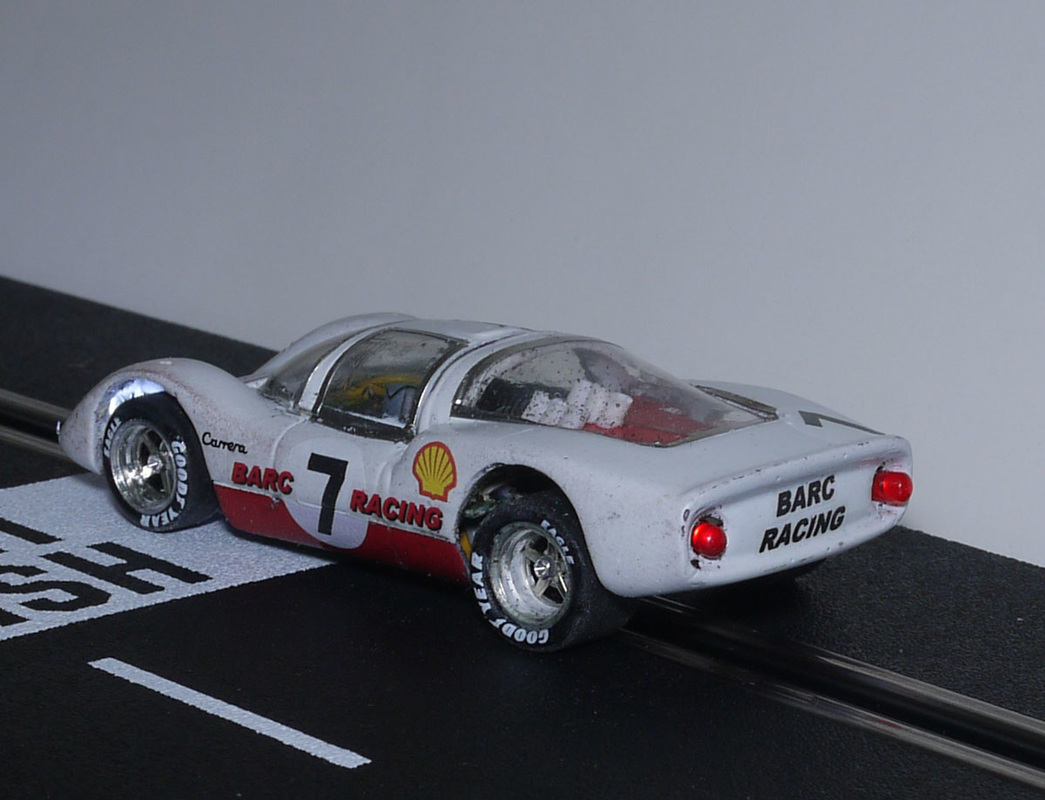
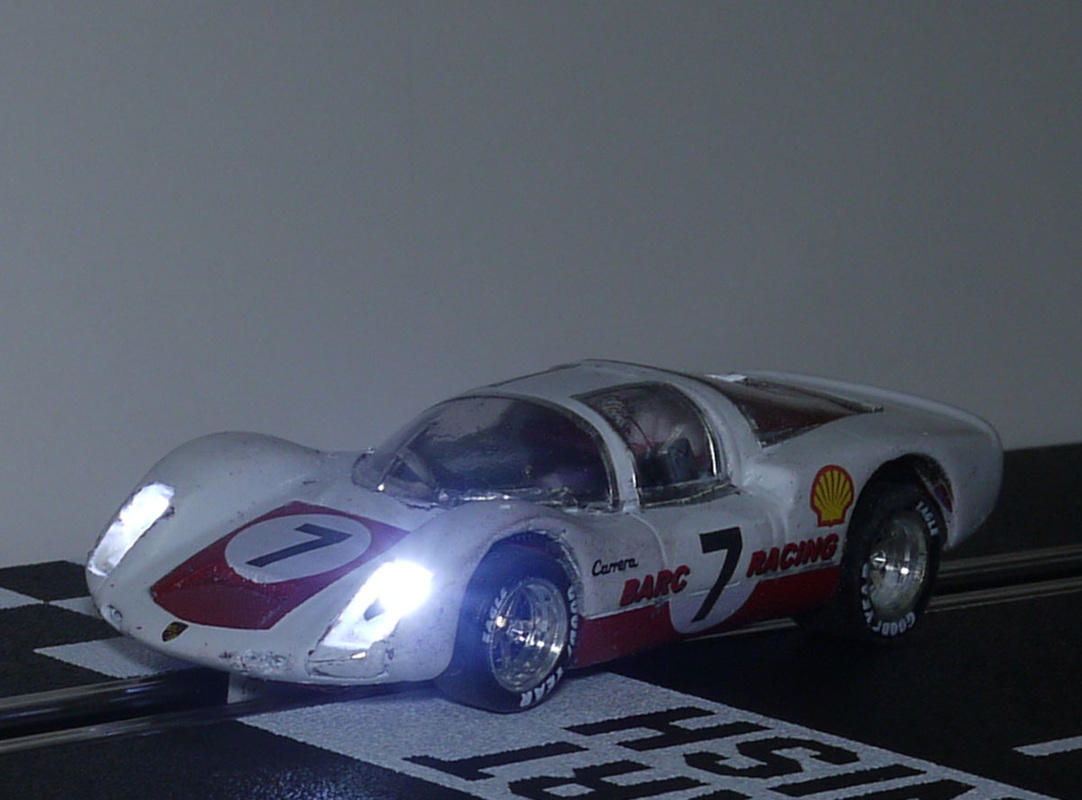
I got the chip all wired up. To save space I got rid of the connectors and wired directly to the board. I used magnet wire for the front headlights as it is very fine and left the front wheels free wheeling. I needed to do this as the decoder wire was too big for the tight area around the headlights and front wheels
I had to set the speed to the lowest setting to get a decent throttle response. Might need a 50 ohm resistor to the motor to make better use of the throttle settings that are avialable
I zoomed around the small D132 set up with the car changing lanes and was happy with the lights and brake lights. Since the pictures were taken I added a rear mounting post and brought the back end of the car down to where is should be.
Decision is now made. All D132 track down the front straight transitioning back to GO track on either end. I have one Double crossover in the GO track and I may have to move the sensor on that to line up with the IR LED on the D132 chip
I had to set the speed to the lowest setting to get a decent throttle response. Might need a 50 ohm resistor to the motor to make better use of the throttle settings that are avialable
I zoomed around the small D132 set up with the car changing lanes and was happy with the lights and brake lights. Since the pictures were taken I added a rear mounting post and brought the back end of the car down to where is should be.
Decision is now made. All D132 track down the front straight transitioning back to GO track on either end. I have one Double crossover in the GO track and I may have to move the sensor on that to line up with the IR LED on the D132 chip
-
BARC 1 - HRW SlotCar Veteran!
- Posts: 2040
- Joined: Wed Dec 23, 2015 6:03 pm
- Location: NW Alberta

Re: Using D132 in 143 scale
![]() by buspor63 » Mon May 02, 2016 7:00 pm
by buspor63 » Mon May 02, 2016 7:00 pm
Concerning the interference, I often run straight wired Slot.it motors on my D132 track. The only issue we've ever had is the CU going into safe mode when all the high amp draw motors accelerated at start with magnet cars using the stock power supply. That fix was provided by splicing a higher amp power supply onto the power cord pig tail and fusing it at 7 amps.... and doing away with magnets.
- buspor63
- HRW SlotCar Veteran!
- Posts: 628
- Joined: Thu Sep 06, 2012 11:46 pm
Re: Using D132 in 143 scale
![]() by BARC 1 » Tue May 03, 2016 1:09 am
by BARC 1 » Tue May 03, 2016 1:09 am
Thanks for the comments and info guys
I am a NoMag guy and the smaller 143 motors should not stress the CU power supply.
Tonight I got busy with the task at hand. Ripped out my front straight and current pitlane to get it ready to accept the D132 stuff. After contemplating the transition pieces I decided to make my own out of a GO straight. Pictures tell a thousand words. IT worked well and I will use scenic foam and drywall compound to finish these off.


I am a NoMag guy and the smaller 143 motors should not stress the CU power supply.
Tonight I got busy with the task at hand. Ripped out my front straight and current pitlane to get it ready to accept the D132 stuff. After contemplating the transition pieces I decided to make my own out of a GO straight. Pictures tell a thousand words. IT worked well and I will use scenic foam and drywall compound to finish these off.
-
BARC 1 - HRW SlotCar Veteran!
- Posts: 2040
- Joined: Wed Dec 23, 2015 6:03 pm
- Location: NW Alberta
Re: Using D132 in 143 scale
![]() by BRS Hobbies » Tue May 03, 2016 5:08 pm
by BRS Hobbies » Tue May 03, 2016 5:08 pm
It's pretty easy to transplant the lap counting sensors and the power wires to a Carrera GO straight track. It might look better with the track all the same width around the track. Either way good luck on the project and I am looking forward to seeing how everything comes together.
Best regards,
Brian
Best regards,
Brian
-

BRS Hobbies - HRW SlotCar Veteran!
- Posts: 500
- Joined: Thu Sep 06, 2012 11:49 am
- Location: Ohio
Re: Using D132 in 143 scale
![]() by BARC 1 » Wed May 04, 2016 6:59 am
by BARC 1 » Wed May 04, 2016 6:59 am
-
BARC 1 - HRW SlotCar Veteran!
- Posts: 2040
- Joined: Wed Dec 23, 2015 6:03 pm
- Location: NW Alberta
Re: Using D132 in 143 scale
![]() by walker » Wed May 04, 2016 8:41 am
by walker » Wed May 04, 2016 8:41 am
Nevertheless Carrera Digital 132 is by no means the ultimate for 43rd scale. The chips ar huge - see the Porsche and how high the body now sits.
I would prefer SSD because their chips are way smaller.
Roland
I would prefer SSD because their chips are way smaller.
Roland
- walker
- HRW SlotCar Veteran!
- Posts: 424
- Joined: Tue Jan 13, 2015 8:42 am
Re: Using D132 in 143 scale
![]() by BRS Hobbies » Wed May 04, 2016 8:59 am
by BRS Hobbies » Wed May 04, 2016 8:59 am
Please be aware that the sensor spacing to the slot is slightly different on D132 in comparison to D143. This would only come into play if using a stock D143 car and/or stock D143 lane changers with the stock D132 Control Unit. Most times it will still work but may lead to a few misses due to the slight mismatch.
Also, the Carrera D132 26740 decoder chip is the smallest one that Carrera offers but it doesn't have lights.
Best regards,
Brian
Also, the Carrera D132 26740 decoder chip is the smallest one that Carrera offers but it doesn't have lights.
Best regards,
Brian
-
BRS Hobbies - HRW SlotCar Veteran!
- Posts: 500
- Joined: Thu Sep 06, 2012 11:49 am
- Location: Ohio
Re: Using D132 in 143 scale
![]() by walker » Wed May 04, 2016 9:47 am
by walker » Wed May 04, 2016 9:47 am
Just as I wrote - SSD is way smaller.
Roland
Roland
- walker
- HRW SlotCar Veteran!
- Posts: 424
- Joined: Tue Jan 13, 2015 8:42 am
Re: Using D132 in 143 scale
![]() by BARC 1 » Wed May 04, 2016 10:30 pm
by BARC 1 » Wed May 04, 2016 10:30 pm
-
BARC 1 - HRW SlotCar Veteran!
- Posts: 2040
- Joined: Wed Dec 23, 2015 6:03 pm
- Location: NW Alberta
31 posts
• Page 1 of 3 • 1, 2, 3
Who is online
Users browsing this forum: No registered users and 38 guests

Powered by phpBB® Forum Software © phpBB Group